Generate Attributes
Select Survey | Point Cloud Generate Attributes to generate dimension attributes for point cloud data.
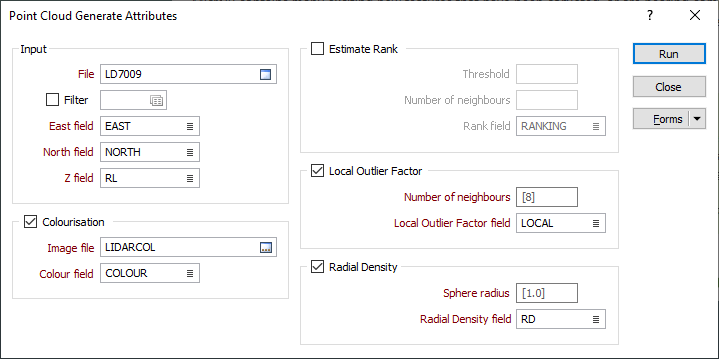
Input
Double-click, or click on the Select icon, to navigate to the location of the file that contains imported point cloud data. This will typically be a data file with a .DAT or .SVY file extension.
East, North, and Z fields
Specify the names of the point coordinate fields in the Input file.
Colourisation
Select this check box to apply colourisation to the input points, based on the colour bands in an input raster image.
Typically, Red/Green/Blue (RGB) values from an aerial photograph will be written to the nominated Colour field.
Image file
Select the image file to obtain colour values from. Any raster image format supported by GDAL may be read.
Colour field
Specify the name of the field to which the RGB values, used to colour-code the points, will be written.
Estimate Rank
The Estimate Rank group is used to calculate the following rankings for a set of points:
|
Rank |
Features |
|---|---|
| 1 | Linear |
| 2 | Planar |
| 3 | 3D |
The rank estimation is performed for each point in the input point cloud. Two parameters are required to estimate rank:
Threshold
The threshold parameter is used to determine when a singular value should be considered non-zero (when the absolute value of the singular value is greater than the threshold). The default value of 0.01 will be suitable in most cases.
Number of neighbours
The Number of neighbours parameter defines the number of points to consider when using singular value decomposition (SVD) to estimate the rank of the points in the point cloud. The default value of 8 will be suitable in most cases.
Rank field
Enter (double-click or click the List icon to select) the name of the Rank field in the Input file.
Local Outlier Factor
The Local Outlier Factor group is used to determine the degree to which a point is an outlier point.
Number of neighbours
The Number of neighbours parameter is used to calculate the Euclidean distance (K-Distance) between a point and its nearest neighbours. The default number of neighbours is 8.
A “local reachability” distance is calculated as the inverse of the mean of all reachability distances for a neighbourhood of points. This reachability distance is defined as the max of the K-Distance to a neighbouring point and that neighbour’s own previously computed K-Distance.
Local Outlier Factor field
Enter (double-click or click the List icon to select) the name of the Local Outlier Factor field in the Input file.
Radial Density
The Radial Density group is used to create a Radial Density attribute.
Sphere radius
The density at each point is computed by counting the number of points falling within a sphere of a given radius (the default is 1.0) and centred at the current point. The Number of neighbours (including the query point) is then normalised by the volume of the sphere.
Radial Density
Enter (double-click or click the List icon to select) the name of the Radial Density field in the Input file.